Synchronization (Mutexes & Semaphores): กุญแจจัดระเบียบ Multitasking หยุดปัญหารถไฟชนกันในโลก Embedded
บทนำ (Introduction)
สวัสดีครับน้องๆ วิศวกรและเพื่อนนักพัฒนาชาว www.123microcontroller.com ทุกคน! กลับมาพบกับวิศวกรขอบตาดำๆ กันอีกครั้งนะครับ
เมื่อโปรเจกต์ของเราซับซ้อนขึ้นจนต้องก้าวเข้าสู่โลกของ Multitasking หรือการใช้ RTOS (Real-Time Operating System) เราจะพบว่าโค้ดที่เคยทำงานได้ดีในลูปเดี่ยวๆ อาจพังพินาศได้ง่ายๆ เมื่อมีหลาย Task ทำงานพร้อมกันและพยายามแย่งกันใช้ทรัพยากร (Shared Resources) แหล่งข้อมูลระดับเซียนได้เตือนว่า การปล่อยให้หลายๆ Thread เข้าถึงตัวแปรหรือฮาร์ดแวร์เดียวกันโดยไม่จัดระเบียบ จะนำไปสู่หายนะที่เรียกว่า “Race Condition”
เพื่อป้องกันปัญหานี้ เราจึงต้องใช้ศาสตร์ที่เรียกว่า Synchronization ซึ่งฮีโร่สองตัวหลักที่เราจะมาทำความรู้จักกันในวันนี้ก็คือ Mutex และ Semaphore ครับ สองตัวนี้ทำงานต่างกันอย่างไร และจะช่วยปกป้องโปรแกรมของเราได้อย่างไร ไปลุยกันเลยครับ!
เนื้อหาหลัก (Core Concept): ผู้คุมกฎแห่ง Multitasking
ในบริบทของระบบปฏิบัติการหรือ Multitasking เมื่อเรามีพื้นที่โค้ดหรือทรัพยากรที่ต้องแชร์กัน (เช่น Global variables, Memory buffers, หรือ Register ของฮาร์ดแวร์) เราจะเรียกพื้นที่เสี่ยงภัยนี้ว่า “Critical Section” หากปล่อยให้ Thread 2 ตัวเข้าไปเขียนข้อมูลทับกันใน Critical Section ก็จะเกิด Race Condition ทำให้ข้อมูลผิดเพี้ยนไป กลไกที่ระบบปฏิบัติการเตรียมไว้ให้เราใช้จัดระเบียบมีดังนี้ครับ:
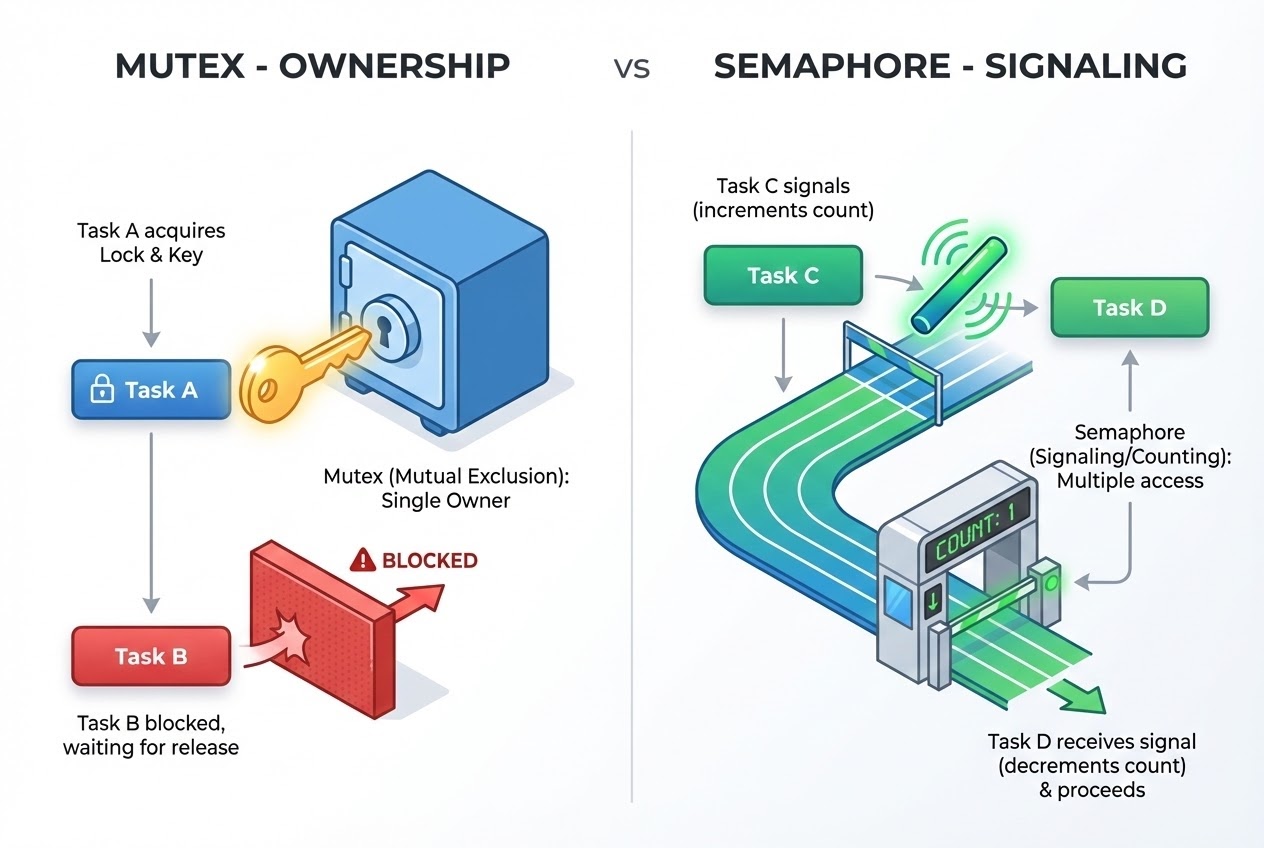
- 1. Mutex (Mutual Exclusion) - กุญแจห้องน้ำแห่งความปลอดภัย
- หลักการ: แหล่งข้อมูลเปรียบเทียบ Mutex ว่าเหมือน “กุญแจห้องน้ำสาธารณะ” ที่มีอยู่เพียงดอกเดียว เมื่อมี Task หนึ่งต้องการใช้ทรัพยากร (เข้าห้องน้ำ) มันจะต้องทำการ “Lock” กุญแจนี้ไว้ หากมี Task อื่นมาขอใช้ มันจะต้องถูกบล็อก (Block) และยืนรอจนกว่า Task แรกจะทำธุระเสร็จและ “Unlock” กุญแจกลับคืนมา
- ความเป็นเจ้าของ (Ownership): กฎเหล็กของ Mutex คือ “ใครล็อก คนนั้นต้องเป็นคนปลดล็อก” Thread ที่ทำการล็อก Mutex จะกลายเป็นเจ้าของ (Owner) จนกว่าตัวมันเองจะสั่งปลดล็อกครับ
- จุดประสงค์หลัก: ใช้เพื่อปกป้อง Critical Section ไม่ให้มีคนอื่นเข้ามาแทรกแซงแบบเด็ดขาด
- 2. Semaphore - ไม้ผลัดและเครื่องนับจำนวน
- หลักการ: Semaphore เป็นตัวแปรจำนวนเต็ม (Integer variable) ที่ใช้เพื่อนับจำนวนทรัพยากรหรือส่งสัญญาณประสานงาน (Signaling)
- การเปรียบเทียบ: ถ้าเป็น Counting Semaphore จะเหมือนเรามีห้องน้ำหลายห้องและกุญแจหลายดอก ตัวแปรจะนับว่ามีกุญแจเหลือกี่ดอก เมื่อ Task เข้าใช้งานจะทำการลดค่า (Wait/Decrement) และเมื่อใช้งานเสร็จจะเพิ่มค่า (Signal/Post/Increment) กลับคืน หากค่าเป็น 0 Task ที่มาทีหลังจะต้องรอ
- Binary Semaphore: มีค่าแค่ 0 หรือ 1 คล้ายกับ Mutex มาก แต่ข้อแตกต่างที่สำคัญคือ Semaphore ไม่มีเรื่องความเป็นเจ้าของ (Ownership) Thread หนึ่งสามารถทำ Wait แล้วให้อีก Thread หนึ่งเป็นคนทำ Signal ก็ได้
- จุดประสงค์หลัก: นิยมใช้สำหรับการ “ส่งสัญญาณ (Signaling)” เช่น เหมือนการส่งไม้ผลัดในวิ่งผลัด Task หนึ่งอาจจะรอรับสัญญาณจากอีก Task หรือจาก Interrupt (ISR) ว่ามีข้อมูลใหม่เข้ามาแล้ว จึงค่อยตื่นขึ้นมาทำงาน
ตัวอย่างโค้ด (Code Example):
มาดูตัวอย่างคลาสสิกของการใช้ Mutex ด้วยไลบรารี Pthreads ในภาษา C เพื่อป้องกัน Race Condition ตอนบวกเลขกันครับ (Clean Code สไตล์สายระบบ):
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
/* สร้างตัวแปร Mutex เพื่อใช้ปกป้อง Critical Section */
pthread_mutex_t my_mutex;
/* Shared Resources (ตัวแปรที่ใช้งานร่วมกัน) */
int shared_a = 5;
int shared_b = 7;
/* ฟังก์ชันการทำงานของ Thread (Worker Thread) */
void* process_shared_data(void* arg) {
/* 🛡️ ก้าวเข้าสู่ Critical Section: ทำการขอ Lock Mutex */
/* ถ้ามี Thread อื่นล็อกอยู่ Thread นี้จะหยุดรอ (Block) ที่บรรทัดนี้ */
pthread_mutex_lock(&my_mutex);
/* === จุดนี้คือ Critical Section (ปลอดภัยแล้ว) === */
shared_a = shared_a + 3;
shared_b = shared_b - 1;
printf("Safe access: a = %d, b = %d\n", shared_a, shared_b);
/* หน่วงเวลาจำลองการประมวลผลฮาร์ดแวร์ */
sleep(1);
/* 🛡️ ทำงานเสร็จแล้ว: ทำการ Unlock คืนกุญแจให้คนอื่นใช้ต่อ */
pthread_mutex_unlock(&my_mutex);
/* ======================================= */
return NULL;
}
int main(void) {
pthread_t t1, t2;
/* 1. เริ่มต้นการทำงานของ Mutex */
pthread_mutex_init(&my_mutex, NULL);
/* 2. สร้าง Threads หลายๆ ตัวให้ทำงานพร้อมกัน */
pthread_create(&t1, NULL, process_shared_data, NULL);
pthread_create(&t2, NULL, process_shared_data, NULL);
/* 3. รอให้ Threads ทั้งหมดทำงานเสร็จ */
pthread_join(t1, NULL);
pthread_join(t2, NULL);
/* 4. ทำลาย Mutex เพื่อคืนทรัพยากรให้ระบบ */
pthread_mutex_destroy(&my_mutex);
return 0;
}
ข้อควรระวัง / Best Practices:
การใช้เครื่องมือ Synchronization แม้จะช่วยรักษาข้อมูล แต่ก็เปรียบเสมือนดาบสองคมที่วิศวกรซอฟต์แวร์ต้องระวังอย่างหนักครับ:
- ระวังผีหลอก Deadlock (ล็อกตาย): ปัญหานี้เกิดขึ้นเมื่อ Task A ล็อก Mutex-1 และกำลังรอ Mutex-2 ในขณะเดียวกัน Task B ก็ล็อก Mutex-2 แล้วหันมารอ Mutex-1 ต่างฝ่ายต่างถือไพ่ของอีกคนและไม่มีใครยอมปล่อย ทำให้ระบบค้างถาวร วิธีแก้: ต้องออกแบบระบบให้ทุก Task ทยอยล็อก Mutex “ตามลำดับเดียวกัน (Predefined order)” เสมอ เพื่อป้องกันการรอเป็นวงกลม (Circular wait)
- ระวังภัยเงียบ Priority Inversion (การสลับความสำคัญ): นี่คือบั๊กบันลือโลกของวงการอวกาศ (เช่น กรณี Mars Pathfinder) อาการคือ Task ความสำคัญต่ำสุดดันไปจับ Mutex ไว้ ทำให้ Task ความสำคัญสูงสุดที่ต้องการ Mutex ตัวนี้ต้องหยุดรอ แย่ไปกว่านั้น หากมี Task ความสำคัญปานกลางโผล่มา มันจะแย่ง CPU ไปทำงานได้หน้าตาเฉย ทำให้ Task สำคัญสุดต้องรอแบบไร้จุดหมาย การแก้ปัญหานี้ต้องใช้ฟีเจอร์ของ OS เช่น Priority Inheritance
- จงทำ Critical Section ให้สั้นที่สุด (The Bottleneck): กูรูหลายท่านเปรียบ Mutex ว่าคือ “คอขวด (Bottleneck)” ของระบบ การถือ Mutex ไว้นานเกินความจำเป็น (เช่น ไปใส่
delay()นานๆ ในนั้น) จะทำลายประสิทธิภาพการทำงานแบบขนานของ Multithreading ย่อยยับ จงล็อก ดึง/แก้ข้อมูล แล้วรีบปลดล็อกทันที - ห้ามใช้ Mutex Lock ภายใน Interrupt (ISR): ถ้าเกิด Interrupt แทรกขึ้นมา แล้วโค้ด ISR พยายามไปเรียก
mutex_lock()ที่บังเอิญถูกถือไว้โดย Thread ที่เพิ่งโดนขัดจังหวะพอดี ระบบของคุณจะ Deadlock ทันที! ใน ISR อนุญาตให้ทำได้แค่ฟังก์ชันแบบ Non-blocking เช่นการโยนsemaphore_signal()เพื่อปลุกให้ Task อื่นตื่นขึ้นมารับช่วงต่อเท่านั้น
สรุป (Conclusion)
ในโลกของระบบสมองกลฝังตัวที่มีการทำ Multitasking กลไก Synchronization เป็นหัวใจหลักที่ขาดไม่ได้ครับ Mutex ถูกสร้างมาเพื่อปกป้องทรัพยากรโดยให้สิทธิ์เป็น “เจ้าของชั่วคราว” ในขณะที่ Semaphore เปรียบเสมือน “เครื่องมือนับและตัวส่งสัญญาณ” เพื่อประสานงานข้าม Task หรือรับไม้ต่อจาก Interrupt การเลือกใช้ให้ถูกประเภทคือสิ่งที่แบ่งแยกวิศวกรมือใหม่กับมือโปรเลยครับ!
ใครเคยเขียน RTOS แล้วเจอปัญหาระบบค้างเพราะ Deadlock หรือมีเทคนิคการส่งข้อมูลแปลกๆ ระหว่าง ISR กับ Task อย่าเก็บไว้คนเดียวนะครับ! แวะเข้ามาตั้งกระทู้แชร์ประสบการณ์ และพูดคุยกันต่อที่บอร์ด www.123microcontroller.com ของพวกเราได้เลย แล้วพบกันใหม่ในบทความหน้า Happy Coding ครับทุกคน!