Scheduling (Round-Robin & STCF): จัดคิวซีพียูอย่างไรให้ยุติธรรม ศาสตร์เบื้องหลัง Multitasking ของสาย Embedded

บทนำ (Introduction)
สวัสดีครับน้องๆ วิศวกรและเพื่อนนักพัฒนาชาว www.123microcontroller.com ทุกคน! กลับมาพบกับวิศวกรขอบตาดำๆ กันอีกครั้งครับ
ในบทความก่อนหน้านี้เราได้คุยกันถึงปรัชญาของ Multitasking แบบ Cooperative และ Pre-emptive ไปแล้ว แต่น้องๆ สงสัยไหมครับว่า ในระบบที่ CPU มีแค่คอร์เดียวและต้องรันหลายๆ งาน (Tasks) พร้อมกัน ตัวระบบปฏิบัติการหรือ “Scheduler (ตัวจัดคิว)” มันใช้ตรรกะอะไรในการตัดสินใจว่า “ใครจะได้ใช้ CPU เป็นคนต่อไป?”
วันนี้พี่จะพาไปแงะคัมภีร์วิศวกรรมซอฟต์แวร์ เพื่อดูอัลกอริทึมการจัดคิวที่คลาสสิกที่สุดอย่าง Round-Robin และอัลกอริทึมสายซิ่งอย่าง STCF (Shortest Time-to-Completion First) กันครับ ว่ามันทำงานอย่างไร และมีบทบาทอย่างไรในโลกของ Embedded Systems ไปลุยกันเลย!
เนื้อหาหลัก (Core Concept): ผู้คุมกฎแห่งเวลา และศิลปะการแบ่งปัน CPU
ในบริบทที่กว้างขึ้นของระบบ Multitasking นั้น แหล่งข้อมูลชั้นครูได้เปรียบเทียบการรันหลายโปรแกรมพร้อมกันว่า เหมือนคนหลายคนกำลังอ่านหนังสือเล่มเดียวกัน แน่นอนว่า ณ เสี้ยววินาทีหนึ่ง มีคนอ่านได้แค่คนเดียว แต่ถ้าทุกคน “ผลัดกันอ่าน” อย่างรวดเร็ว มันก็จะดูเหมือนทุกคนได้อ่านพร้อมๆ กัน หน้าที่การจัดคิวนี้คือของ Scheduler ซึ่งมีอัลกอริทึม 2 ตัวที่น่าสนใจดังนี้ครับ:
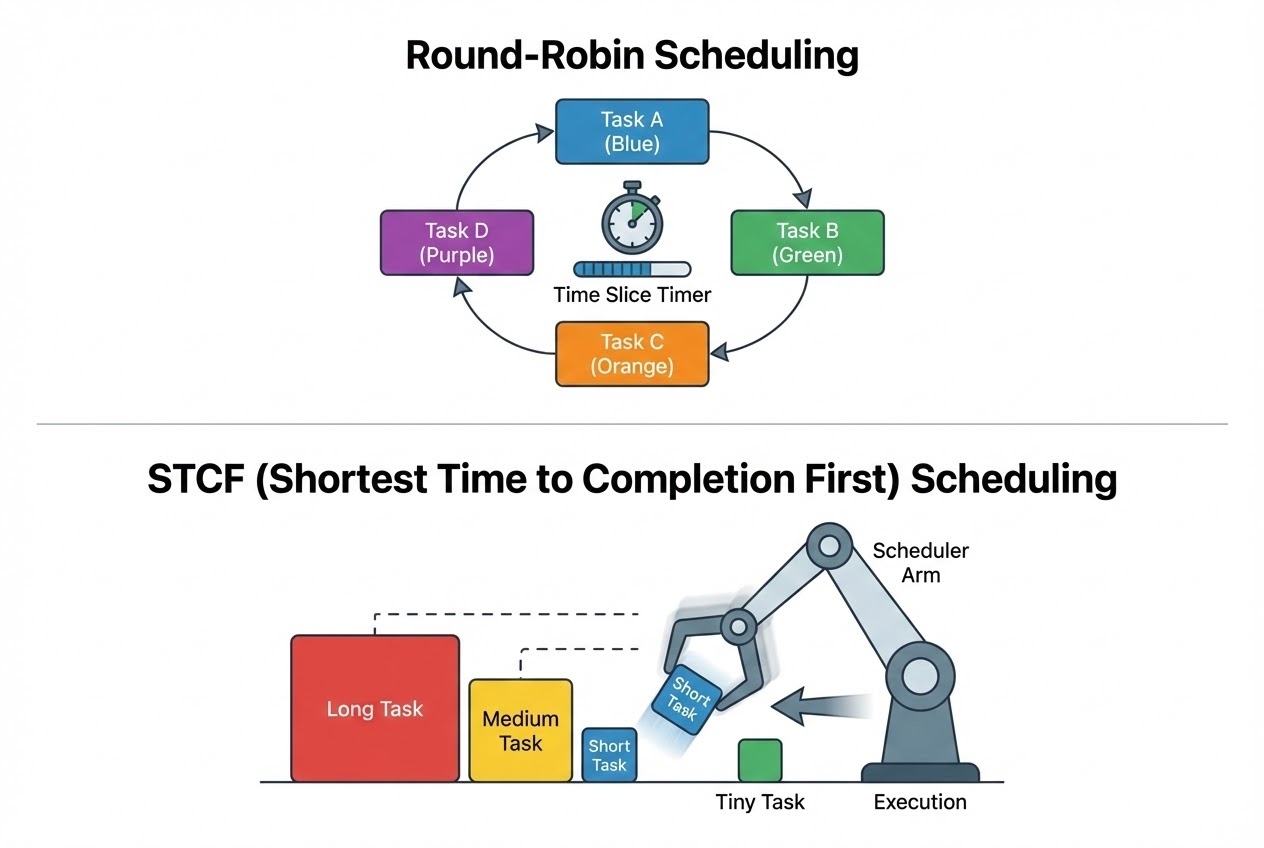
- 1. Round-Robin Scheduling (ยุติธรรม ไม่ทิ้งใครไว้ข้างหลัง):
- หลักการ: เป็นหนึ่งในวิธีที่ง่ายและเป็นที่นิยมที่สุด หลักการคือการแบ่งเวลาของ CPU ออกเป็นช่วงสั้นๆ เท่าๆ กัน เรียกว่า “Time Slice” หรือ Tick
- การทำงาน: เมื่อ Task หนึ่งถูกรันจนหมดโควตาเวลา (Time Slice) ของตัวเอง ตัว Scheduler จะสั่งหยุด (Preempt) แล้วนำ Task นั้นไปต่อท้ายแถว จากนั้นก็ดึง Task ถัดไปในคิวขึ้นมารันต่อวนไปเรื่อยๆ เป็นวงกลม
- จุดเด่น: ยุติธรรมและรับประกันได้เลยว่าไม่มี Task ไหนถูกปล่อยทิ้งให้รอจนแห้งตาย (Starvation-free) และมีความเป็น Deterministic (คาดเดาเวลาได้)
- จุดอ่อน: ระบบนี้ไม่สนใจ “ความสำคัญ (Priority)” หรือ “ขนาด (Size)” ของ Task เลย ในงานสมองกลฝังตัว บาง Task อาจใช้เวลาแค่ 1 มิลลิวินาที (ms) ในขณะที่อีก Task ใช้เวลาเป็น 100 ms การให้เวลาเท่ากันหมดอาจทำให้ Task ที่ใช้เวลาน้อยต้องรอนานเกินความจำเป็น และมีค่า Turnaround time (เวลาเฉลี่ยตั้งแต่เริ่มจนงานเสร็จ) ที่ค่อนข้างแย่
- 2. STCF - Shortest Time-to-Completion First (ใครเสร็จก่อน ได้รันก่อน):
- หลักการ: เกิดมาเพื่อแก้ปัญหา Turnaround time ของ Round-Robin ครับ อัลกอริทึมนี้จะประเมินว่า Task ไหนใช้เวลาในการทำงาน “น้อยที่สุด” จะได้สิทธิ์รันก่อนเสมอ
- การทำงานแบบไดนามิก: หากมี Task ใหม่แทรกเข้ามาในคิว ตัว Scheduler จะเปรียบเทียบเวลาที่เหลือของ Task ที่กำลังรันอยู่ กับเวลาของ Task ใหม่ หาก Task ใหม่ใช้เวลาน้อยกว่า มันจะ “แย่ง (Preempt)” CPU ไปใช้ทันที!
- จุดเด่น: ลดการทำ Context Switch (การสลับบริบทของ CPU) ได้ดีมาก และทำให้งานโดยรวมเสร็จไวขึ้น
- จุดอ่อน (ทำไมถึงไม่เหมาะกับ Embedded): มันเป็น Dynamic Scheduler ที่กินพลังประมวลผลของ CPU ในการคำนวณคิวสูงมาก และที่ร้ายแรงที่สุดคือ หากมี Task สั้นๆ โผล่มาเรื่อยๆ Task ที่ต้องใช้เวลาทำงานนานๆ จะถูกแย่ง CPU ตลอดกาล (Starvation)
- มรดกตกทอด: แม้ STCF จะไม่ค่อยถูกใช้ตรงๆ ใน RTOS แต่ปรัชญาของมันที่ว่า “งานสั้นควรได้สิทธิ์ก่อน” ได้กลายมาเป็นรากฐานของการออกแบบ Rate-Monotonic Scheduling (RMS) ซึ่งเป็นระบบกำหนด Priority แบบตายตัวที่ฮิตที่สุดในงาน Real-Time โดยให้ Task ที่มีคาบเวลาสั้นสุด ได้ Priority สูงสุดนั่นเองครับ!
ตัวอย่างโค้ด (Code Example):
เพื่อให้เห็นภาพ พี่ขอยกตัวอย่างการจำลอง Round-Robin Scheduler แบบพื้นฐานที่สุด โดยใช้ Array ของพอยน์เตอร์ฟังก์ชัน (Function Pointers) ในภาษา C ครับ (โค้ดนี้จำลองแนวคิด Cooperative Round-Robin ที่แต่ละ Task ทำงานสั้นๆ แล้ววนลูปคิวถัดไป)
#include <stdio.h>
#include <stdint.h>
/* ประกาศ Function Prototypes สำหรับ Tasks */
void task_read_sensor(void);
void task_update_display(void);
void task_send_serial(void);
/* สร้าง Array ของ Function Pointers เก็บรายชื่อ Task ในคิว */
#define NUM_TASKS 3
void (*task_queue[NUM_TASKS])(void) = {
task_read_sensor,
task_update_display,
task_send_serial
};
/* ========================================================
* ตัวจำลอง Round-Robin Scheduler แบบง่าย
* ======================================================== */
int main(void) {
uint8_t current_task_index = 0;
printf("Starting Round-Robin Scheduler...\n");
/* ลูปการทำงานหลัก (Main Loop) */
while (1) {
/* รัน Task ตามคิวปัจจุบัน */
task_queue[current_task_index]();
/* สลับคิวไปยัง Task ถัดไป แบบ Round-Robin (วงกลม) */
current_task_index++;
if (current_task_index >= NUM_TASKS) {
current_task_index = 0; /* วนกลับไป Task แรกเมื่อจบวง */
}
/* ในระบบจริง ตรงนี้อาจจะมีการหน่วงเวลา หรือรอ Timer Tick
* ก่อนที่จะสลับไปรัน Task ถัดไป */
}
return 0;
}
/* ========================================================
* การทำงานของแต่ละ Task (ต้องทำงานให้เสร็จเร็วๆ แล้วคืน CPU)
* ======================================================== */
void task_read_sensor(void) { /* อ่านค่าเซ็นเซอร์... */ }
void task_update_display(void){ /* อัปเดตหน้าจอ LCD... */ }
void task_send_serial(void) { /* ส่งข้อมูลผ่าน UART... */ }
ข้อควรระวัง / Best Practices:
การเลือกใช้อัลกอริทึมจัดคิวในงานสมองกลฝังตัว มีหลุมพรางที่ต้องระวังดังนี้ครับ:
- ความเหนื่อยล้าจากการสลับ Context (Context Switch Overhead): ในระบบ Pre-emptive Round-Robin หากคุณตั้งค่า Time Slice (Tick) ไว้ “สั้นเกินไป” CPU จะสูญเสียเวลาไปกับการเซฟและกู้คืนค่า Register (Context Switch) มากกว่าเวลาที่ได้รันโค้ดของ Task เสียอีก! ซึ่งส่งผลเสียต่อประสิทธิภาพ (Efficiency) อย่างรุนแรง ต้องบาลานซ์ค่า Tick ให้พอดีครับ
- ระวังปัญหา Starvation: หากคุณพยายามประยุกต์ใช้แนวคิดแบบ STCF หรือรันระบบที่อนุญาตให้ Task ความสำคัญสูงแทรกได้ตลอดเวลา (Dynamic preemption) ต้องมั่นใจว่า Task ที่สำคัญน้อย (เช่น Task บันทึก Log) จะยังมีโอกาสรันบ้าง ไม่เช่นนั้นระบบอาจจะทำงานผิดพลาดเพราะคิวหลังๆ ไม่เคยได้รับการประมวลผลเลย
- Round-Robin ไม่การันตี Real-Time: หากระบบของคุณมี Task ฉุกเฉินที่ต้องตอบสนองทันที (เช่น ตรวจจับไฟไหม้ หรือหยุดมอเตอร์) การใช้ Round-Robin ล้วนๆ จะทำให้ระบบพังได้ เพราะ Task ฉุกเฉินต้องไปต่อคิวชาวบ้าน! แนะนำให้ใช้อัลกอริทึมแบบ Priority-based Preemptive ควบคู่กัน โดยให้ Task ฉุกเฉินมี Priority สูงสุด แล้วใช้ Round-Robin จัดการเฉพาะ Task ที่มี Priority เท่ากันเท่านั้นครับ
สรุป (Conclusion)
Round-Robin คือความยุติธรรมที่เรียบง่าย ในขณะที่ STCF คือความพยายามรีดเค้นเวลาให้เสร็จไวที่สุด อัลกอริทึมทั้งสองนี้สะท้อนให้เห็นถึงศิลปะของ Scheduler ในการบริหารทรัพยากร CPU ที่มีอยู่อย่างจำกัดให้เกิดประโยชน์สูงสุดในโลกของ Multitasking ครับ
น้องๆ คนไหนกำลังเขียน RTOS ใช้เอง หรือกำลังจูนค่า Timer Tick ใน FreeRTOS/RTX51 แล้วเจอปัญหาระบบหน่วง หรืออยากแชร์ประสบการณ์การปรับแต่ง Scheduler ลองแวะเข้ามาตั้งกระทู้พูดคุยและโชว์โค้ดกันต่อได้ที่เว็บบอร์ด www.123microcontroller.com ของพวกเราได้เลยนะครับ! แล้วพบกันใหม่ในบทความหน้า Happy Coding ครับทุกคน!