Hosted Environment และ RTOS: สภาพแวดล้อมติดปีก เมื่อโค้ด C มีระบบปฏิบัติการเป็นพี่เลี้ยง
Hosted Environment และ RTOS: สภาพแวดล้อมติดปีก เมื่อโค้ด C มีระบบปฏิบัติการเป็นพี่เลี้ยง
สวัสดีครับน้องๆ วิศวกรและเพื่อนนักพัฒนาชาว www.123microcontroller.com ทุกคน! กลับมาพบกับวิศวกรขอบตาดำๆ กันอีกครั้งครับ
ในบทความก่อนหน้านี้ เราได้บุกป่าฝ่าดงไปในโลกของ Freestanding Environment หรือการเขียนโค้ดแบบ Bare-metal ที่ไม่มีระบบปฏิบัติการ (OS) มาช่วยกันแล้ว วันนี้เราจะมาดูเหรียญอีกด้านหนึ่งในโลกของภาษา C นั่นก็คือ Hosted Environment ครับ
เมื่อโปรเจกต์ Embedded ของเราเริ่มใหญ่ขึ้น การจัดการทุกอย่างด้วยตัวเองอาจทำให้โค้ดพันกันเป็นสปาเกตตี การนำระบบปฏิบัติการ (Operating Systems) หรือ RTOS (Real-Time Operating System) เข้ามาเป็น “พี่เลี้ยง” จึงเป็นทางออกที่วิศวกรนิยมใช้กัน แหล่งข้อมูลชั้นครูอธิบายเรื่องนี้ในบริบทของสภาพแวดล้อมไว้อย่างน่าสนใจมากครับ วันนี้เราจะมาเจาะลึกกันว่า Hosted Environment คืออะไร OS/RTOS เข้ามามีบทบาทอย่างไร และเราจะได้สิทธิพิเศษอะไรบ้างเมื่อมีพี่เลี้ยงคอยคุมระบบให้ ลุยกันเลยครับ!
ดินแดนแห่ง Hosted Environment และ OS
ในมาตรฐานภาษา C ได้แบ่งขอบเขตสภาพแวดล้อมการทำงานไว้ชัดเจน โดย Hosted Environment มีความหมายลึกซึ้งและกว้างขวางดังนี้ครับ:
1. สภาพแวดล้อมที่มี OS เป็นผู้คุมกฎ (Operating System Support)
Hosted Environment คือสภาพแวดล้อมที่โปรแกรม C ไม่ได้ทำงานโดดเดี่ยว แต่มีระบบปฏิบัติการ (OS) คอยจัดการทรัพยากรเบื้องหลังให้ ตัว OS จะทำหน้าที่เป็นเหมือน “ผู้จัดการบริษัท” ที่ควบคุมฮาร์ดแวร์ จัดสรรหน่วยความจำ และเป็นตัวกลางคอยรับส่งข้อมูล (I/O) ให้กับโปรแกรมของเรา
2. จัดเต็มด้วย Standard Library
ข้อดีที่สุดของ Hosted Environment คือเราสามารถใช้งานฟังก์ชันใน C Standard Library ได้ “ครบทุกตัว” แบบเต็มพิกัด ไม่ว่าจะเป็นฟังก์ชันจัดการไฟล์ (<stdio.h>), การจองหน่วยความจำแบบไดนามิก (malloc() ใน <stdlib.h>), หรือการจัดการสตริง (<string.h>) ซึ่งในโลกของ Freestanding เราจะไม่มีของพวกนี้ให้ใช้เลย
3. จุดเริ่มต้นที่ main() และตัวแปร Environment
ใน Hosted Environment โปรแกรมจะถูกบังคับให้เริ่มทำงานที่ฟังก์ชัน main() เสมอ และที่พิเศษกว่านั้นคือ OS สามารถส่งข้อมูลสภาพแวดล้อมเบื้องต้น (Environment Variables) เข้ามาให้โปรแกรมผ่านอาร์กิวเมนต์ของ main() (เช่น argc, argv, envp) หรือผ่านฟังก์ชัน getenv() เพื่อให้โปรแกรมรู้ว่าตัวเองกำลังรันอยู่ในสภาวะแบบไหน
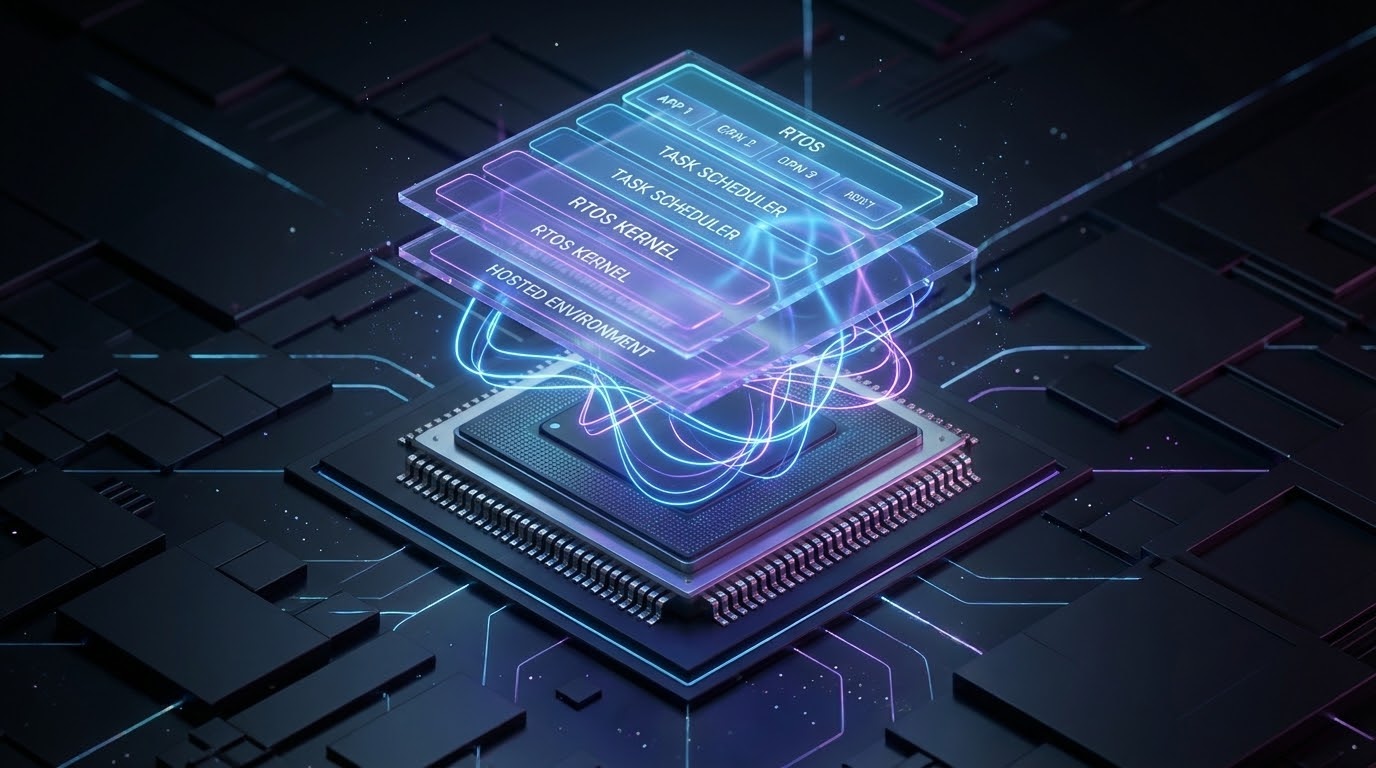
4. สู่โลกของ RTOS (Real-Time Operating System)
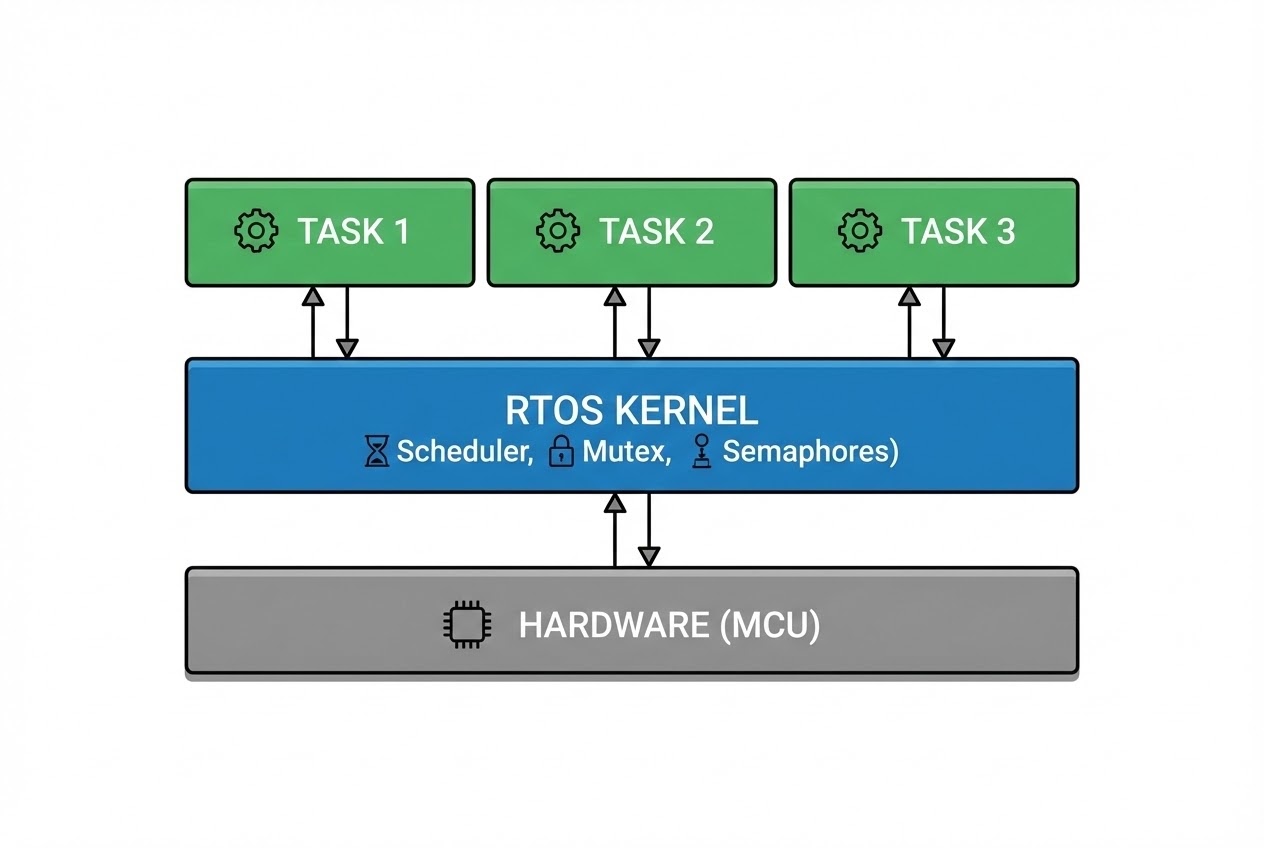
ในงาน Embedded Systems ปกติเราจะไม่ได้ใช้ OS ตัวใหญ่ๆ อย่าง Windows หรือ Linux (ยกเว้นบอร์ดระดับสูงที่รัน Linux Embedded) แต่เราจะใช้ RTOS ซึ่งเป็นระบบปฏิบัติการขนาดเล็กที่ออกแบบมาเพื่องานที่ต้องการ “ความแม่นยำด้านเวลา (Real-time constraints)” RTOS จะเข้ามาช่วยสร้าง Multitasking Environment ทำให้เราสามารถแตกโปรแกรมเป็นงานย่อยๆ (Tasks หรือ Threads) ที่ดูเหมือนทำงานขนานกันไปได้ โดย RTOS จะทำหน้าที่จัดคิว (Scheduler), สลับการทำงานของ CPU (Context Switch), และจัดการการสื่อสารระหว่าง Task ให้เราครับ
ตัวอย่างโค้ด (Code Example)
มาดูตัวอย่างโค้ด C ที่แสดงให้เห็นการตรวจสอบ Hosted Environment และการดึงค่า Environment Variable มาใช้งาน พร้อมกับการจำลองโครงสร้างของ Task ในรูปแบบ RTOS สไตล์ Clean Code กันครับ:
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
/*
* 1. ตรวจสอบ Environment ว่าเป็น Hosted หรือไม่ด้วย Preprocessor
* __STDC_HOSTED__ จะมีค่าเป็น 1 ถ้าเรามี OS คอยซัพพอร์ต
*/
#if __STDC_HOSTED__ == 1
#define ENVIRONMENT_MODE "Hosted (OS Supported)"
#else
#define ENVIRONMENT_MODE "Freestanding (Bare-metal)"
#error "This code requires a Hosted Environment to run!"
#endif
/*
* 2. จำลองโครงสร้าง Task สำหรับ RTOS
* ในโลกของ RTOS แต่ละ Task จะเหมือนกับมีลูป main() เล็กๆ เป็นของตัวเอง
*/
void sensor_task(void *argument) {
while (true) {
// อ่านค่าเซ็นเซอร์...
// rtos_task_delay(100); // 🛡️ ยอมสละ CPU ให้ Task อื่นได้ทำงานบ้าง
}
}
/*
* 3. จุดเริ่มต้นของโปรแกรมใน Hosted Environment จะอยู่ที่ main() เสมอ
* และเราสามารถรับค่าสภาพแวดล้อมจาก OS ได้ผ่านอาร์กิวเมนต์
*/
int main(int argc, char *argv[]) {
printf("System is running in: %s\n", ENVIRONMENT_MODE);
/*
* 4. การดึงค่า Environment Variables จาก OS
* OS จะส่งค่าคอนฟิกต่างๆ มาให้เราผ่านฟังก์ชัน getenv() ของ <stdlib.h>
*/
char *path_var = getenv("PATH");
if (path_var != NULL) {
printf("Current OS PATH is: %s\n", path_var);
} else {
printf("PATH variable not found.\n");
}
/* จำลองการเริ่มต้น RTOS (สร้าง Task แล้วสั่งให้ Scheduler ทำงาน) */
// rtos_task_create(sensor_task, "SensorTask", ...);
// rtos_start_scheduler();
/* ใน Hosted Environment โปรแกรมสามารถคืนค่าสถานะกลับไปให้ OS ได้ (เช่น EXIT_SUCCESS) */
return EXIT_SUCCESS;
}
ข้อควรระวัง / Best Practices
การมี OS หรือ RTOS เข้ามาช่วยนั้นสะดวกสบายมากครับ แต่คัมภีร์ Secure Coding และผู้เชี่ยวชาญด้านสถาปัตยกรรมระบบได้เตือนถึงหลุมพรางสำคัญไว้ดังนี้:
- ระวังการแก้ไข Environment Pointer (กฎ ENV31-C): ฟังก์ชันอย่าง
getenv()จะคืนค่าเป็น Pointer ที่ชี้ไปยังหน่วยความจำที่ OS เป็นคนจัดการ การพยายามนำ Pointer นั้นไปเขียนทับ (Modify) เพื่อเปลี่ยนค่า Environment เป็นสิ่งต้องห้ามและทำให้เกิด Undefined Behavior ครับ หากต้องการเปลี่ยนค่าให้ใช้ฟังก์ชันเฉพาะของ OS (เช่นsetenv()ใน POSIX) แทน - API ที่ไม่เหมือนกันเลย (The API Nightmare): ไม่เหมือนระบบปฏิบัติการทั่วไปที่มีมาตรฐาน POSIX กลางให้ใช้ ในโลกของ RTOS (เช่น FreeRTOS, eCos, Micrium) มักจะมี API ในการสร้าง Task หรือการใช้ Semaphore ที่แตกต่างกันไปหมด วิศวกรซอฟต์แวร์ที่ดีจึงควรสร้างชั้นนามธรรม (OS Abstraction Layer - OSAL) มาครอบฟังก์ชันของ RTOS ไว้ เพื่อให้สามารถเปลี่ยนยี่ห้อ RTOS ในอนาคตได้โดยไม่ต้องแก้โค้ดลอจิกหลักทั้งหมดครับ
- ระวัง Overhead จากการสลับ Task (Context Switch Overhead): การให้ RTOS จัดการสลับ Task ย่อมมีราคาที่ต้องจ่าย (Overhead) ทุกครั้งที่สลับ Task ตัว OS จะต้องหยุดพัก เพื่อเซฟค่า Register ของ CPU ปัจจุบันลง Stack และดึงค่าของ Task ถัดไปขึ้นมา หากเราตั้งค่าความถี่ของ RTOS Tick เร็วเกินไป CPU อาจจะเสียเวลาไปกับการสลับ Task มากกว่าเวลาที่ใช้รันโค้ดจริงๆ เสียอีก!
- มหันตภัยจากทรัพยากรที่ใช้ร่วมกัน (Shared Resources): เมื่อหลาย Task วิ่งอยู่บน OS เดียวกัน และเข้าถึงตัวแปรหรือฮาร์ดแวร์ตัวเดียวกัน จะเสี่ยงต่อการเกิด Race Condition ทันที ใน Hosted Environment คุณต้องใช้เครื่องมืออย่าง Mutex หรือ Semaphore ที่ OS มีให้ เพื่อล็อกป้องกัน (Synchronization) เสมอครับ
สรุปทิ้งท้าย
Hosted Environment คือโลกที่โปรแกรม C ของเราได้รับการดูแลอย่างดีจาก OS หรือ RTOS ครับ มันช่วยจัดการฮาร์ดแวร์เบื้องหลัง เตรียมไลบรารีมาตรฐานให้ใช้งานอย่างครบครัน และมีระบบ Task Scheduling ให้เราสามารถเขียนโปรแกรมที่ซับซ้อนและมีเรื่องเวลาเข้ามาเกี่ยวข้อง (Real-time) ได้ง่ายขึ้นอย่างมหาศาล แลกกับ Overhead ของระบบและการบริหารทรัพยากรที่ต้องระมัดระวังให้ดี
น้องๆ คนไหนกำลังเลือกใช้ RTOS ตัวแรก (ไม่ว่าจะเป็น FreeRTOS, Zephyr หรือ eCos) แล้วเจอปัญหาเรื่องการตั้งค่า Stack ของ Task หรือบั๊กหลอนๆ จากการแย่งกันใช้ตัวแปร อย่าลืมแวะเข้ามาตั้งกระทู้แชร์โค้ด และพูดคุยกันต่อที่บอร์ด www.123microcontroller.com ของพวกเราได้เลยนะครับ! แล้วพบกันใหม่ในบทความหน้า Happy Coding ครับทุกคน!