Beyond the Super Loop: Understanding FreeRTOS on ESP32 vs. Traditional Arduino
Evolution of the Embedded Mindset
When moving from traditional boards like the Arduino Uno or Nano (AVR-based) to the ESP32, the most significant change isn’t just the clock speed—it’s the transition from a “Super Loop” to a Real-Time Operating System (RTOS).
Here is a deep dive into why this matters for professional IoT development.
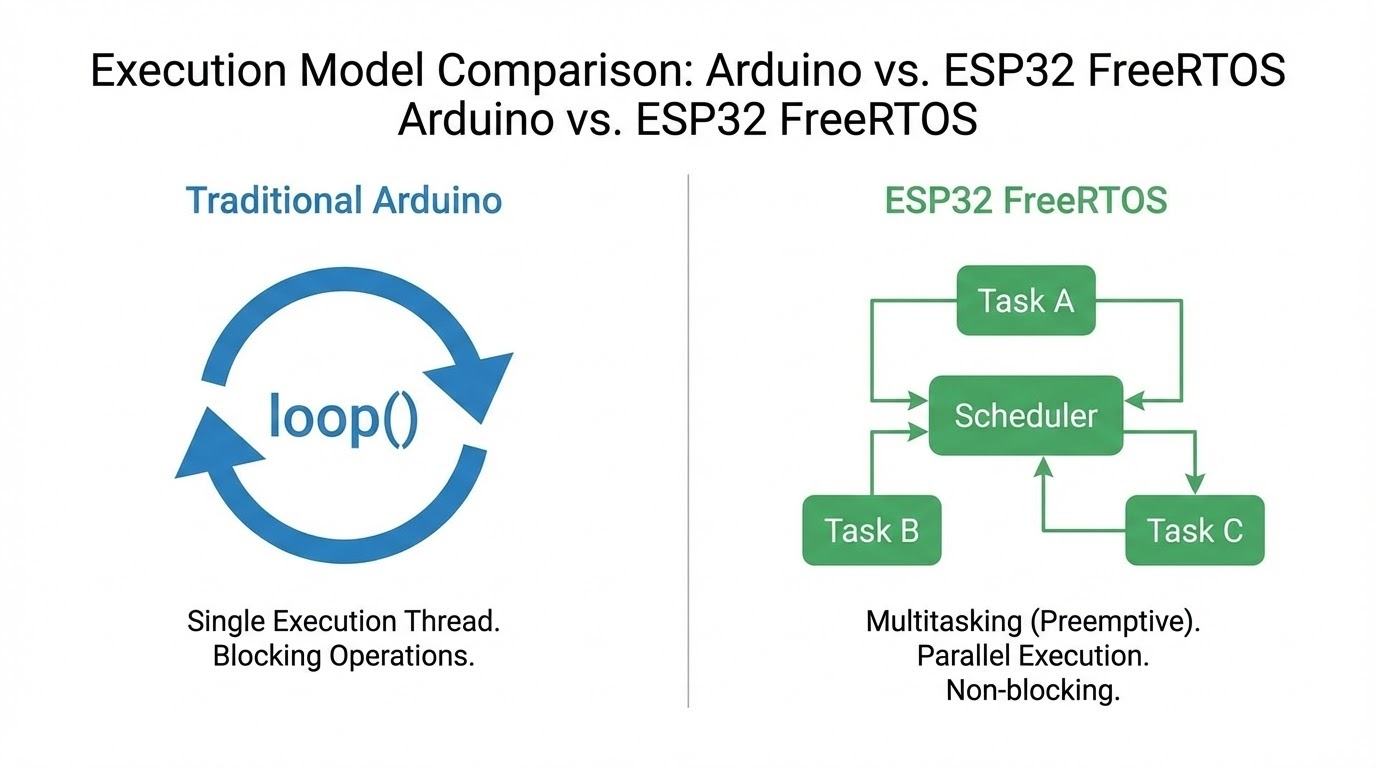
1. Execution Structure: Super Loop vs. Multitasking
- Traditional Arduino (Super Loop): Code runs in a single-threaded sequence. If you call
delay(5000), the entire system hangs for 5 seconds. You cannot read sensors or process data during that time. - FreeRTOS on ESP32 (Preemptive Multitasking): The system is divided into independent Tasks. The Scheduler performs “Time Slicing,” switching between tasks so rapidly that they appear to run in parallel. If one task is blocked (e.g., waiting for WiFi), the CPU immediately switches to another task.
2. Under the Hood: ESP32 is Always Running FreeRTOS
Many developers don’t realize that the Arduino Core for ESP32 is actually a layer on top of FreeRTOS.
- The loopTask: Your standard
setup()andloop()functions are actually wrapped inside a FreeRTOS task namedloopTaskrunning at Priority 1. - Smart Delay: On the ESP32, the
delay()function is mapped tovTaskDelay(). Instead of wasting CPU cycles, it tells the RTOS to put the current task to sleep and yield the CPU to others.
3. Dual-Core Support (SMP)
The ESP32 features Symmetric Multiprocessing (SMP), which is a game-changer:
- Core 0 (Protocol CPU): Handles background tasks like the Wi-Fi and Bluetooth stacks.
- Core 1 (Application CPU): Where your main Arduino code typically runs.
With FreeRTOS, you can use
xTaskCreatePinnedToCore()to force a specific core to handle heavy calculations while the other stays responsive to sensor inputs.
4. Priority Management
In FreeRTOS, you assign a Priority (0 to 24) to each task. The Scheduler ensures the highest priority task that is “Ready” always gets the CPU. This is “Preemptive”—if a critical event occurs, the RTOS can interrupt a lower-priority task instantly to handle the emergency.
5. Safe Communication (Inter-Task)
Avoid using global variables for data sharing between tasks to prevent Race Conditions. FreeRTOS provides thread-safe tools:
- Queues: For sending data packets between tasks.
- Semaphores & Mutexes: For locking shared hardware (like an I2C bus).
- Task Notifications: Lightweight “pokes” to signal other tasks.
Summary
While the traditional Arduino loop is perfect for simple, linear projects, FreeRTOS on ESP32 is the gateway to building complex, industrial-grade systems that leverage the full power of dual-core hardware.