Scheduling (Round-Robin & STCF): Dominating CPU Queues & The Brutal Mechanics of Embedded Multitasking

Introduction: The Master Timekeeper & CPU Dominion
Greetings, elite engineers and hardcore developers aggressively defending the www.123microcontroller.com grid! The dark-eyed engineer has securely logged back into the terminal.
In our previous tactical briefing, we violently tore into the opposing philosophies of Cooperative and Pre-emptive Multitasking. But operatives, have you interrogated the deeper architecture? Inside a system possessing strictly one single physical Core, simultaneously besieged by multiple massive execution loads (Tasks)… what exact mathematical logic does the Operating System or the “Scheduler (The Queue Commander)” deploy to brutally decide: “Which unit secures the CPU next?”
Today, we rip open the global Software Engineering grimoires, violently exposing the absolute most classic queueing algorithm ever designed: Round-Robin! We will also dissect the hyper-aggressive speed-demon algorithm: STCF (Shortest Time-to-Completion First). We are dissecting exactly how these architectures physically operate and their absolute critical role dominating the Embedded Systems theater. Initiate the grid!
Core Theory Autopsy: The Time Wardens and the Art of CPU Rationing
Operating inside the massive overarching theater of Multitasking, elite grandmasters frequently deploy a heavy metaphor: Executing multiple programs simultaneously is identical to multiple operatives desperately attempting to read the exact same classified document. Obviously, exactly one operative reads the document at any microscopic fraction of a second. However, if they aggressively “rapid-cycle rotating” the document constantly, it projects the massive illusion that everyone is reading simultaneously! This brutal rationing operation is the exclusive domain of the Scheduler. Let’s interrogate two fascinating primary algorithms:
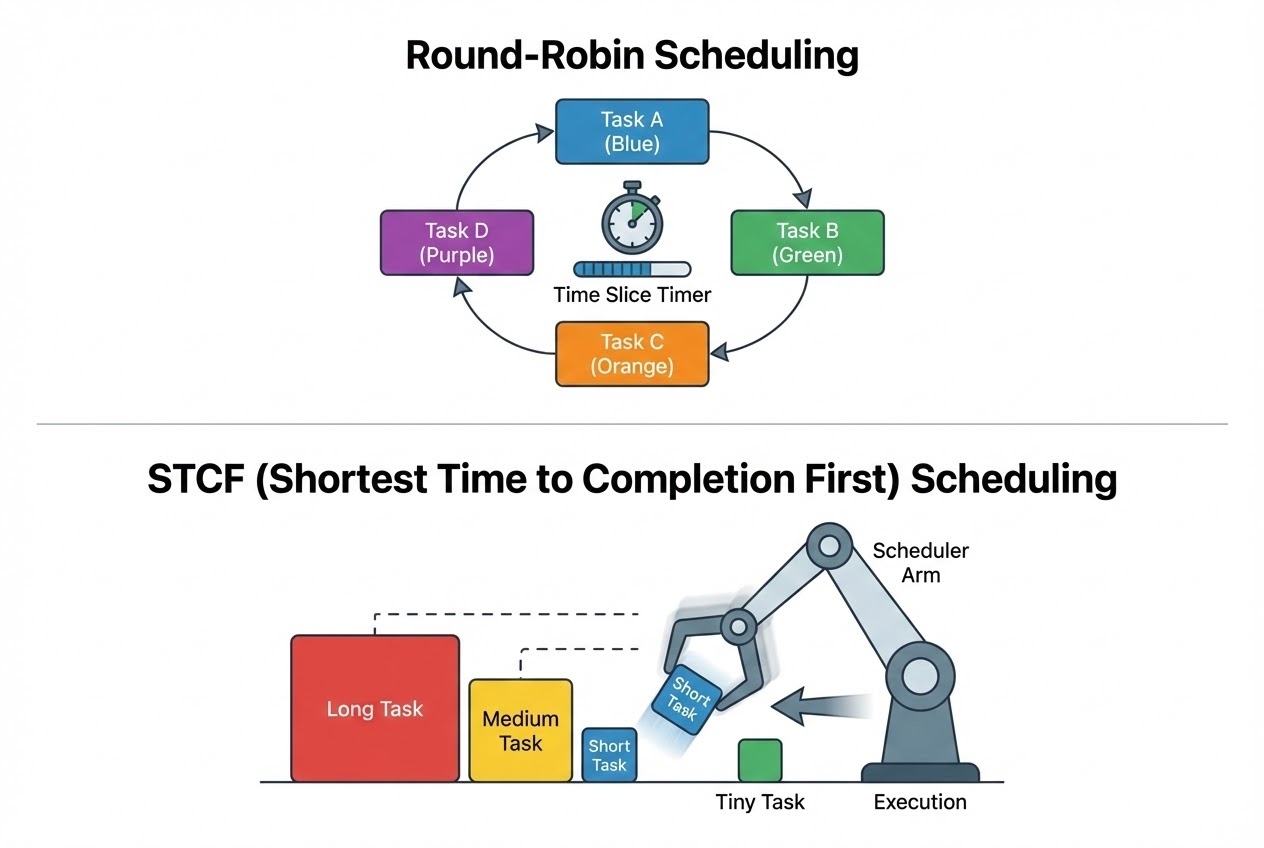
- 1. Round-Robin Scheduling (Absolute Justice, Zero Operatives Left Behind):
- The Prime Directive: This stands as one of the absolute simplest, most universally deployed architectures ever forged! The core directive brutally slices the CPU’s total time into incredibly tiny, perfectly equal tactical intervals classified as a “Time Slice” or Tick.
- Execution Mechanics: The exact microsecond a running Task exhausts its allocated Time Slice quota, the Scheduler violently intercepts (Preempts) the Task, forcibly extracting it from the CPU and violently dumping it straight to the absolute back of the waiting queue! The Scheduler then aggressively yanks the next Task in the queue, plunging it into the CPU, infinitely repeating this cycle in a massive continuous loop.
- Lethal Strengths: It guarantees absolute authoritarian justice! It virtually completely eradicates the catastrophic threat of any single Task being abandoned to rot and die (Starvation-free). Furthermore, it provides incredibly stable, predictable operational timing (Deterministic)!
- The Fatal Catastrophe: This architecture is utterly, completely blind to “Priority” or payload “Magnitude (Size)”! In the Embedded warfare theater, an emergency Task might demand exactly 1 millisecond (ms) to execute, while a massive data-dump Task demands 100 ms. Forcing them to endure identical Time Slices violently forces the hyper-fast Task to suffer agonizing queued delays, generating horrific overall Turnaround times (the global average latency from initiation to termination)!
- 2. STCF - Shortest Time-to-Completion First (The Speed Demon Execute):
- The Prime Directive: Forged exclusively to absolutely assassinate the horrific Turnaround time penalties plaguing Round-Robin! This hyper-aggressive algorithm ruthlessly calculates exactly which queued Task demands the absolute “Minimum” execution time, and violently guarantees that specific Task secures the CPU first!
- Dynamic Execution: If a fresh, unknown Task suddenly breaches the queue, the Scheduler violently interrogates and compares the remaining execution time of the currently active Task against the new hostile Task. If the new Task calculates faster, it instantly “Assassinates (Preempts)” the active Task, violently hijacking the CPU!
- Lethal Strengths: It massively slaughters the frequency of executing heavy Context Switches (CPU context flipping), generating absolutely terrifying overall system completion velocity!
- The Fatal Catastrophe (Why Embedded Rejects It): This is a heavily Dynamic Scheduler that burns massive amounts of raw CPU calculation power simply constantly mathematically evaluating the queue! The absolute most catastrophic threat: If a continuous wave of tiny, hyper-fast Tasks repeatedly floods the queue, any massive, heavy-duty Task will be violently denied the CPU forever (Triggering absolute Starvation)!
- The Tactical Legacy: While raw STCF is virtually never deployed directly inside an RTOS, its core brutal philosophy (“The fastest payload executes first”) successfully mutated, forging the absolute bedrock foundation of Rate-Monotonic Scheduling (RMS)! RMS is the absolute most dominant, legendary Fixed-Priority architecture deployed in Hard Real-Time environments, permanently assigning the absolute Maximum Priority to the Task boasting the shortest execution cycle!
Firing Live Code Rounds: Round-Robin Emulation
To visually acquire this target, I am deploying a hyper-basic simulation of the Round-Robin Scheduler, aggressively weaponizing an Array of Function Pointers inside native C! (This specific code structure simulates a Cooperative Round-Robin architecture, where every Task manually executes rapidly and cycles the queue).
#include <stdio.h>
#include <stdint.h>
/* Actively declaring the Function Prototypes commanding the Tasks */
void task_read_sensor(void);
void task_update_display(void);
void task_send_serial(void);
/* Forging the Function Pointer Array serving as the active Queue Roster */
#define NUM_TASKS 3
void (*task_queue[NUM_TASKS])(void) = {
task_read_sensor,
task_update_display,
task_send_serial
};
/* ========================================================
* The Minimalist Round-Robin Scheduler Emulator
* ======================================================== */
int main(void) {
uint8_t current_task_index = 0;
printf("IGNITING Round-Robin Scheduler Sequence...\n");
/* Initiating the Primary Infinite Execution Loop (Main Loop) */
while (1) {
/* Violently execute the specific Task designated by the current Queue Index */
task_queue[current_task_index]();
/* Aggressively increment indexing targeting the subsequent Task (The Round-Robin Circle) */
current_task_index++;
if (current_task_index >= NUM_TASKS) {
current_task_index = 0; /* Violently snap back to index 0, restarting the massive loop! */
}
/* Tactical Note: Inside a live physical RTOS, this exact coordinate would trigger a heavy Delay
* or aggressively await a Hardware Timer Tick before authorizing the subsequent Task execution! */
}
return 0;
}
/* ========================================================
* Targeted Task Execution Payloads (Must execute violently fast and surrender the CPU!)
* ======================================================== */
void task_read_sensor(void) { /* Interrogating hardware sensors... */ }
void task_update_display(void){ /* Blasting LCD pixel matrices... */ }
void task_send_serial(void) { /* Firing data payloads via UART... */ }
Proximity Defcons: Heavy Best Practices & Fatal Pitfalls
Selecting and deploying a scheduling algorithm inside a bare-metal embedded core triggers highly classified booby traps you MUST absolutely monitor:
- The Context Switch Fatigue Collapse (Overhead Annihilation): Operating a Pre-emptive Round-Robin system, if the operative configures the Time Slice (Tick) parameter “insanely small”, the CPU will violently hemorrhage and bleed its execution cycles entirely wasted constantly saving and reloading System Registers (Context Switching), burning significantly more time managing the queue than actually executing code! This triggers catastrophic Efficiency deterioration. You MUST absolutely calculate and balance the perfect Tick interval!
- Beware the Starvation Death Spiral: If an operative aggressively attempts to deploy STCF logic, or engineers a custom Dynamic Preemption architecture permitting high-priority Tasks to violently interrupt infinitely, you MUST absolutely guarantee your low-tier Tasks (e.g., Background Datalogging) eventually secure CPU authorization! Failure guarantees the system silently detonates as the background queues literally rot and die devoid of processing!
- Round-Robin Absolutely FAILS Hard Real-Time: If your architecture controls highly volatile Emergency Tasks demanding instantaneous microsecond response (e.g., Fire suppression triggers or violent Motor halts), deploying an exclusive pure Round-Robin system guarantees massive physical destruction! The Emergency Task will be fatally forced to wait in the queue behind standard tasks! Elite architects strictly recommend deploying a hybrid Priority-based Preemptive algorithm: Violently assigning the Emergency Task the absolute Maximum Priority, while deploying Round-Robin exclusively to manage identically ranked low-priority Tasks!
Conclusion
Round-Robin represents purely elegant, absolute operational justice, whereas STCF represents a hyper-aggressive, violent attempt to extract maximum velocity slaughtering execution times. Collectively, both algorithmic architectures brilliantly expose the absolute hardcore art of the Scheduler, successfully dominating severely restricted CPU hardware resources generating magnificent efficiency inside the Multitasking domain!
If any operatives operating on the server are actively forging a custom RTOS, or currently screaming at their monitors attempting to tune the Timer Tick frequency inside FreeRTOS/RTX51 suffering violent system lag, or simply wish to share extreme Scheduler optimization tactics… blast a flare and upload your code straight onto our active combat grid at www.123microcontroller.com! Maintain heavy shields, Happy Hardcore Coding to absolutely every operative!