Cooperative vs Pre-emptive: The Two Philosophical Extremes of Multitasking & CPU Scheduling in Embedded Systems
Introduction: The Illusion of Parallel Computing
Greetings, elite engineers and hardcore developers aggressively defending the www.123microcontroller.com grid! The dark-eyed engineer has securely logged back into the terminal. Today, we violently escalate our architectural complexity straight into the brutal realm of Operating Systems (OS) and heavy Software Architecture!
Whenever an operative deploys microcontroller logic demanding extreme complexity—for example, simultaneously actively interrogating temperature sensors, continuously blasting LCD screen UI updates, and violently transmitting high-speed UART payloads via DMA—we absolutely MUST deploy the hardcore paradigm classified as Multitasking! This initiates a massive “Pseudoparallel Illusion” tricking the entire environment into believing the CPU is executing massive parallel operations simultaneously, despite possessing strictly one single physical Core executing exactly one single physical command at a time!
The raw mechanical witchcraft actively driving this impossible illusion is the massive Execution Queue Manager classified as the Scheduler! Operating deep inside the Embedded Software combat theater, global grandmasters strictly fracture the core philosophical directives of this Scheduler into two absolute opposing extremes: Cooperative and Pre-emptive! Today, we aggressively tear into both operating architectures, violently dissecting their lethal strengths, their catastrophic weaknesses, and determining exactly which battle doctrine you must deploy securing your live operations! Initiate the launch sequence!
Core Theory Autopsy: The CPU Bloodbath between “The Gentlemen” and “The Absolute Dictator”
Operating inside the heavily classified OS Architecture theater, authorizing the system to violently rip the execution thread from Task A and transfer it executing Task B (classified as a Context Switch) mandates incredibly strict command rules! Elite engineering manuals expose the two dominant operational models:
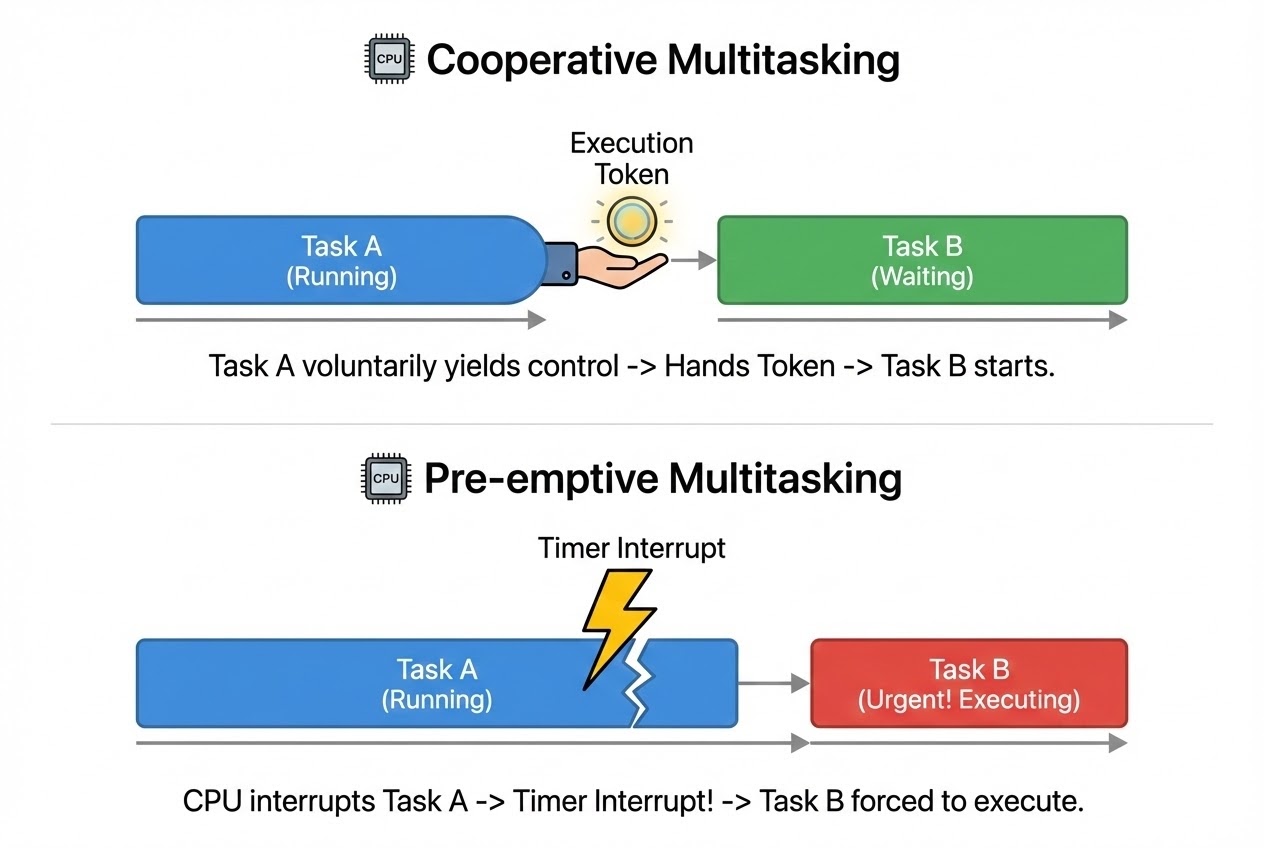
- 1. Cooperative Multitasking (The Diplomatic Alliance):
- The Prime Directive: This architecture operates strictly on absolute “Blind Operational Trust.” In this environment, the actively running Task possesses total unquestioned authority hoarding the CPU infinitely… until it successfully terminates its operation, or “voluntarily, peacefully” surrenders the CPU execution thread (Voluntarily yield) straight back to the master Scheduler authorizing the subsequent Task to execute!
- The Tactical Metaphor: Imagine a highly civilized diplomatic conference where gentlemen politely take turns dominating the microphone. Once the active speaker successfully concludes his briefing, he politely physically hands the microphone to the next official.
- Lethal Strengths: Incredibly simplistic architecture! It requires practically ZERO RAM penalty (Low overhead) and the operative NEVER sweats suffering a violent Task interruption actively corrupting data inside memory, strictly because every single Task actively controls exactly when it intentionally halts execution!
- The Fatal Catastrophe: If exactly ONE single Task is forged containing heavily flawed logic—such as initiating an infinite
while(1)dead loop aggressively attempting to read a totally unresponsive hardware sensor (Busy waiting) or suffering a fatal logic bug—it will violently hijack the entire CPU permanently! Absolutely ZERO other Tasks will ever execute again (Triggering total Starvation or a complete system flatline)!
- 2. Pre-emptive Multitasking (The Dictatorial Warden):
- The Prime Directive: This represents the absolute burning core dominating every modern Real-Time Operating System (RTOS)! The system absolutely DOES NOT CARE if a running Task volunteers surrendering the CPU! The Scheduler (virtually always violently triggered by a relentless Hardware Timer Interrupt) wields the absolute authoritarian power to violently “Interrupt & Override (Pre-empt)” and brutally hijack the CPU stringing it straight back to its control the exact millisecond the active timeout expires (Time slice), or the exact microsecond a massive “Higher Priority” VIP Task suddenly demands execution!
- The Tactical Metaphor: Imagine a chaotic live debate commanded by a hostile Chairman wielding a stopwatch. The exact millisecond your time vanishes, the Chairman brutally terminates your microphone! Alternatively, if a top-tier VIP kicks open the doors, the Chairman instantly suspends your speech mid-sentence authorizing the VIP to scream orders!
- Lethal Strengths: It absolutely guarantees hard, merciless Real-time response thresholds (Deterministic execution)! Elite Maximum-Priority Tasks (e.g., heavily intercepting catastrophic emergency failure interrupts) will violently secure the CPU instantly, absolutely never waiting for lowly Tasks to terminate!
- The Fatal Catastrophe: It consumes massive, heavy CPU and Memory payload capacities! Because every single explosive Task switch physically forces the core to execute a massive “Context Switch”—violently cloning copying absolutely every active CPU Register and Stack frame dumping it into RAM, and identically reloading the secondary Task’s state data! Most critically: The operative MUST launch extreme defensive measures aggressively shielding shared memory payloads preventing totally destructive Race Conditions!
Firing Live Code Rounds: Architectural Structure
Let us visually dissect the exact C code architectures commanding these two vastly opposing operating systems. Aggressively note exactly how the raw loop mechanics fundamentally mutate!
#include <stdint.h>
#include <stdbool.h>
/* ======================================================================
* TACTICAL PROTOCOL 1: Cooperative Multitasking
* (The operative MUST manually inject rtos_yield() forcing the Task to surrender!)
* ====================================================================== */
void task_sensor_coop(void) {
while(1) {
// Violently interrogate the hardware sensor
read_sensor();
// 🛡️ LETHAL WARNING: If you completely fail executing this yield command, the system instantly flatlines here forever!
// This command broadcasts the signal screaming to the Scheduler: "I am going dark, authorize the next operation!"
rtos_yield();
}
}
void task_display_coop(void) {
while(1) {
update_lcd();
rtos_yield(); // Actively surrendering CPU dominance back to the allied Task
}
}
/* ======================================================================
* TACTICAL PROTOCOL 2: Pre-emptive Multitasking (Heavy RTOS)
* (The OS violently hijacks and swaps Tasks triggering Timer Interrupts. The Operative ONLY focuses on raw execution logic!)
* ====================================================================== */
void task_critical_alarm_preemptive(void) {
/* Hard Intelligence: Assume this Task executes possessing Absolute Maximum Priority */
while(1) {
// The Task initiates a deep sleep awaiting a violent Signal or Event (The OS violently Blocks this Task completely moving it off the CPU grid)
os_wait_event(ALARM_EVENT);
// The exact microsecond the ALARM Event detonates, the OS brutally "Assassinates (Pre-empts)" the currently running Task
// and violently teleports the execution thread directly striking this coordinate instantaneously!
trigger_siren();
}
}
void task_calc_preemptive(void) {
/* Hard Intelligence: This represents a Low Priority Task */
while(1) {
// You are authorized to brutally execute the heaviest mathematical loops imaginable totally ignoring yield commands!
// Because the exact millisecond your Time slice evaporates or a massive Alarm detonates, the OS will violently execute the cut!
heavy_math_calculation();
}
}
Proximity Defcons: Heavy Best Practices & Fatal Pitfalls
Electing to command either operating paradigm triggers massive booby traps explicitly warned by elite global software engineering grimoires and secure coding guidelines:
- The Silent Assassin - Priority Inversion (Pre-emptive Specific): This is the absolute ultimate legendary RTOS nightmare bug! Assume a low-tier Task (Task-Low) actively hijacked and locked a heavy Mutex securing a critical variable. Suddenly, the absolute maximum Task (Task-High) violently demands that exact variable! Task-High is brutally Blocked pending the release. Suddenly, a totally irrelevant middle-tier Task (Task-Medium) executes violently hijacking the CPU from Task-Low (because Medium heavily outranks Low). The catastrophic result: The absolute most critical Task-High is violently suspended frozen entirely blocked by an irrelevant Task-Medium operating via proxy! The absolute countermeasure requires deploying an OS heavily armed with “Priority Inheritance” protocols!
- Violently Shield Payloads Deploying Mutexes (Pre-emptive Specific): Operating inside a Pre-emptive theater, the brutal Task switch triggers violently straight in the absolute middle of active C code lines (e.g., directly midway incrementing a value deep inside an assembly instruction)! If multiple independent Tasks actively assault hitting the identical
globalmemory data… you instantly trigger a catastrophic Race Condition! You MUST absolutely deploy heavy Mutual Exclusion (Mutex) arrays or Semaphores rigorously locking down your “Critical Sections” inside impenetrable blast shields! - NEVER Hoard CPU Real Estate (Cooperative Specific): Inside the Diplomatic Cooperative architecture, the absolute Golden Law is violently banning massive functions like
delay_ms()or executing empty dead loops identically likewhile(!flag)! These operations violently hoard the CPU permanently burning cycles rendering the system totally unresponsive! If a Task demands waiting, you MUST aggressively mutate its State Machine or violently spamyield()commands endlessly authorizing the massive system grid to continuously advance!
Conclusion
Summarizing the intelligence payload: Cooperative scheduling operates identically to a highly civilized, perfectly synchronized allied assault squad where every operative flawlessly executes their mission and voluntarily coordinates timing. It absolutely dominates tiny, highly-controlled architectures. Conversely, Pre-emptive scheduling operates as a massive dictator relentlessly commanding, assassinating, and violently prioritizing execution guaranteeing brutal Real-time response thresholds commanding highly complex operational matrices! Selecting the exact correct philosophical foundation represents step one forging an absolutely impenetrable Embedded Software architecture!
If any operatives operating on the server are obsessively interested in forging a custom bare-metal Cooperative OS Scheduler entirely from scratch, or violently sharing catastrophic war stories suffering brutal Race condition detonation bugs inside a heavy RTOS… drop a flare actively sharing your intelligence straight onto our active combat grid at www.123microcontroller.com! Maintain heavy shields, Happy Hardcore Coding to absolutely every operative!